 工业机器人选型原则:全面指南
工业机器人的选型至关重要,以确保其在特定应用中的最佳性能和效率。本文将探讨影响工业机器人本体选型的九个关键原则:
1. 有效负载
有效负载指的是机器人在其工作空间内可携带的最大重量,通常范围从 3 公斤到 1300 公斤。在考虑有效负载时,必须将工件重量和机器人手爪重量计算在内。还需要考虑机器人的负载曲线,因为它会随着空间范围的不同而变化。
2. 应用行业
机器人的预期应用场景对于选型至关重要。例如:
- 对于拾取和放置,SCARA 机器人是理想选择。
- 对于快速放置轻小物料,Delta 机器人是最佳选择。
- 对于协作式操作,协作机器人应该优先考虑。
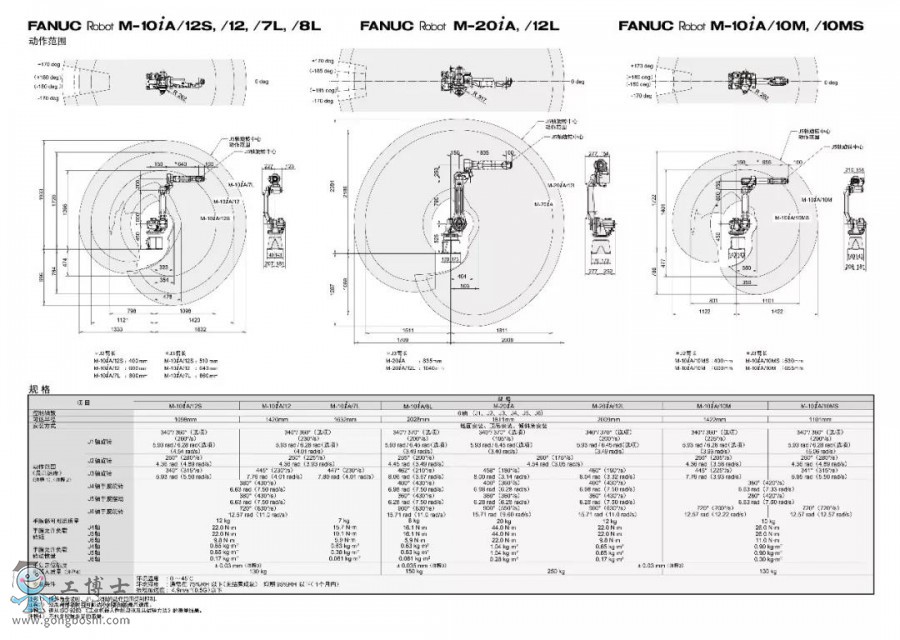
3. 最大动作范围
了解机器人需要覆盖的最大距离至关重要。动作范围图可以帮助确定机器人是否适合特定应用。需要注意的是,机器人水平和垂直运动范围以及非工作区域。
4. 运转速度
运转速度对于工作周期时间的影响很大。虽然规格表会列出最大速度,但实际速度取决于加减速时间。此参数通常以度/秒为单位。
5. 刹车和转动惯量
刹车对于精确和可重复的位置至关重要。某些机器人配备所有轴的刹车,而其他型号则并非如此。还需要考虑意外断电时的安全措施。转动惯量可以为设计提供额外的安全性。
6. 防护等级
机器人的防护等级取决于其工作环境。从事食品处理、实验室或医疗应用的机器人需要更高的防护等级。应根据应用或当地规范选择适当的等级。
7. 自由度 (轴数)
机器人的轴数决定了其灵活度。简单应用可能只需要 4 轴,而需要在狭小空间或复杂运动中操作的应用则需要 6 轴或 7 轴机器人。
8. 本体重量
对于定制机器人单元的设计,机器人的重量至关重要。需要考虑在其安装平台上的重量和支撑需求。
9. 重复定位精度
重复定位精度根据应用而定。它表示机器人返回预定位置的精度水平,对于精密操作至关重要。
结论
通过考虑这些原则,工程师和用户可以为特定应用选择最合适的工业机器人本体。全面了解机器人的功能、能力和限制对于优化生产力、效率和安全性至关重要。
工业机器人选型原则:全面指南
工业机器人的选型至关重要,以确保其在特定应用中的最佳性能和效率。本文将探讨影响工业机器人本体选型的九个关键原则:
1. 有效负载
有效负载指的是机器人在其工作空间内可携带的最大重量,通常范围从 3 公斤到 1300 公斤。在考虑有效负载时,必须将工件重量和机器人手爪重量计算在内。还需要考虑机器人的负载曲线,因为它会随着空间范围的不同而变化。
2. 应用行业
机器人的预期应用场景对于选型至关重要。例如:
- 对于拾取和放置,SCARA 机器人是理想选择。
- 对于快速放置轻小物料,Delta 机器人是最佳选择。
- 对于协作式操作,协作机器人应该优先考虑。
3. 最大动作范围
了解机器人需要覆盖的最大距离至关重要。动作范围图可以帮助确定机器人是否适合特定应用。需要注意的是,机器人水平和垂直运动范围以及非工作区域。
4. 运转速度
运转速度对于工作周期时间的影响很大。虽然规格表会列出最大速度,但实际速度取决于加减速时间。此参数通常以度/秒为单位。
5. 刹车和转动惯量
刹车对于精确和可重复的位置至关重要。某些机器人配备所有轴的刹车,而其他型号则并非如此。还需要考虑意外断电时的安全措施。转动惯量可以为设计提供额外的安全性。
6. 防护等级
机器人的防护等级取决于其工作环境。从事食品处理、实验室或医疗应用的机器人需要更高的防护等级。应根据应用或当地规范选择适当的等级。
7. 自由度 (轴数)
机器人的轴数决定了其灵活度。简单应用可能只需要 4 轴,而需要在狭小空间或复杂运动中操作的应用则需要 6 轴或 7 轴机器人。
8. 本体重量
对于定制机器人单元的设计,机器人的重量至关重要。需要考虑在其安装平台上的重量和支撑需求。
9. 重复定位精度
重复定位精度根据应用而定。它表示机器人返回预定位置的精度水平,对于精密操作至关重要。
结论
通过考虑这些原则,工程师和用户可以为特定应用选择最合适的工业机器人本体。全面了解机器人的功能、能力和限制对于优化生产力、效率和安全性至关重要。
本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!





